骨骼是人體的基礎架構。人體之所以能夠活動自如,是因為骨頭之間有關節相連,相連的骨頭末端各包著柔軟的軟骨,中間只有狹窄的縫隙,縫隙中有一層薄薄的潤滑液來保護骨頭不致因摩擦而受損。肌腱、韌帶附著於關節另一端之骨端上,由膠原組織所構成,通常存在於活動大之關節附近,外覆鞘膜內有潤滑液幫助滑動。
http://www.drug-king.com.tw/calcium-su.htm 從圖中我們可以發現,這骨頭和關節的組成,彷彿就是一個機械的機構,由連桿(Links)和接頭(joints)構成的機構,人體藉由關節而能自由活動,就是在機械機構上藉由接點的連接傳遞動力和機械能。
http://www.zjtcm.net/wljx/Basic/jp/image/t1.jpg
全身
上圖是人體的骨骼。以下,是我將人體的骨骼歸納成三種功能,並與機構組合的運用上做比較:
(1)支撐功能:骨骼使我們的身軀能站得隱,保持人的基本形狀。象脊椎骨之稱身體,頸椎骨支撐頭部。這一類的骨頭因為要相當穩固,故較缺乏可動性。
(2)保護功能:全身的重要器官都要骨作出保護,例如:骨盆可以保護膀胱,胸骨可以保護心肺等。因此為了要達保護作用,這類的骨骼大體為一大片的,不可動。在機械上,就像固定型(靜止型)的機械組件,結構要相當堅固,才能承受外力。
(3)運動功能:站、立、坐、臥等動作,都要運動。骨與關節、肌肉同時協調,就可做出各種動作。動關節外常有韌帶,用以固定骨的位置,並且可以伸張活動。這類方便活動的骨骼彷彿活動機構組件,可以依其組成的方式不同而達不同功能。
http://diy.21tx.com/2004/09/09/11537.html 前臂骨
手肘是一個相當特殊的「絞鏈」關節, 由三塊骨頭組成, 分別是遠端肱骨, 近端尺骨以及橈骨; 軟組織包括內, 外側副韌帶以及肌腱。
http://www.ivsky.com/Photo/MicroImages/716/61295.jpg\http://catalog.nucleusinc.com/imagescooked/4199W.jpg
腳踝
其中Fibula=腓骨;Tibia=脛骨;Talus=距骨。當腳底板要往外翻時,因為受到腓骨的阻擋,因此角度有限;而往內時,由於並沒有像外側空間受限制。這也是由三個骨頭組合成,其性質很像3D空間中的球對,自由度為三,(減去平移的三個自由度)
http://www2s.biglobe.ne.jp/~wellness/wel_home_kneejoint.htm 膝蓋
這跟手肘的骨骼類似,像機構中的平面旋轉對,自由度僅為一,故很容易受到外力而受傷。造成韌帶破裂等等,使關節無法完整連接。
http://www.a-hospital.com/ahpic02/2006-6/2006623173352547.jpg
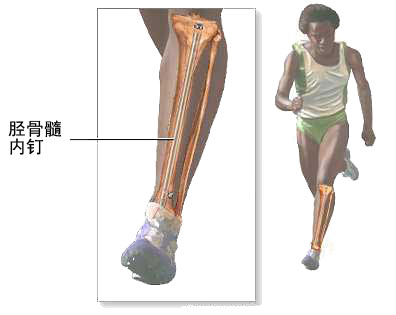
骨骼打釘
上圖就是因為骨骼受到傷害導致關節的鬆脫,誠如接頭掉了般,所以需要釘子,當作接頭來固定。
從上述的分析探討,我們發現關節和接點誠如機械中的LINK 和JOINT,是運作的一體,而且必須要兩個以上的連趕且每端至少要有一個接點才能組成。
題目二
創造和發明是相輔相成的。而在我們工程領域,所需考慮的大致上有資訊、成本、材料、能源、時間、創意、設備這幾項。以下,我藉由汽車的發展史來說明發明創造與設計的合理步驟。
汽車並不是一個人發明的,而是由許多人經過長久年代不段的研究改進,及世界各地的科學家.工程師精心的傑作才有今日的汽車,重要的發展簡介如下:
(1)西元1769年,法國人庫格納特(Nicoias Joseph Cugnot)利用蒸汽機創造出第一輛以蒸氣機推動的車子,約2馬力,時速每小時4公里.
(2)西元1885年,德國人賓士(Karl Friedrich Benz)將自己創製之1/2馬力的內燃機,裝於三輪車(tricycle)上.
(3)西元1886年,德國人賓士及戴姆勒(Gottlied Daimler)二是分別將內燃機安裝於車輛上,此為內燃機汽車之開始,賓士並把自己發明的點火裝置於車上,時速可達每小時18公里.
(4)西元1893年,美國人杜瑞兒兩位兄弟(Charles E Duryes & Frank E Duryea)於麻州成功的製造了第一部美國汽車.
(5)西元1896年,美國第一家汽車製造公司奧次摩比爾(Oldsmobile Motor Works)成立於密西根州,令賓士汽車率先採用全封閉式車身(fully enclosed body).
(6)西元1900年,近代汽車使用之基本構造及裝置皆大部發展完成,木製的車架開始由鋼製的鐵架所取代.
(7)西元1900年,法國多家汽車公司採用鋁合金齒輪箱引擎零件後軸殼等.
(8)西元1904年,避震器已大量使用於車上.
(9)西元1906年,雷梅(Remy)兄弟將發電機裝於車上.
(10)西元1907年,法爾斯東(Firestone)正式創用橡膠輪胎.
(11)西元1908年,福特(Henry Ford),提出他的T型(Model T)汽車,使用無聲時規齒輪,採取大量生產方式,廉價供應顧客,使美國汽車工業呈現蓬勃發展.
(12)西元1910年,義大利人依索塔(Isotta)首次應用四輪同時煞車系統,美國及歐洲盛行用鋁板製造車身.
(13)西元1911年,凱迪拉克(Cadillac)車首次使用電動馬達.
(14)西元1913年,雅樂(Pierce Arrow)將車頭燈裝於前擋泥板上.
(15)西元1920年,已使用滑動齒輪變速箱,引擎並用水冷卻及I型汽門裝置等,當年汽車年產量已突破兩百輛大關.
(16)西元1923年,汽車外型已採用噴漆了,且車上首次裝用空氣輪胎.
(17)西元1924年,用柴油引擎推動之汽車問世,皮洛雷特(Purolator)首創用潤滑油濾清器.
(18)西元1926年,派克(Packard)車開始使用內擺線市齒輪作為最後傳動,次年美國車開始出現X型車架.
(19)西元1928年,法國工校校長迪格爾(Onesime Degueur)發明差速器,同年各式齒輪變速箱亦首次使用凱迪拉克車上.
(20)西元1929年,羅柯斯頓(Card Ruxton)氏,首創前輪傳動.
(21)西元1931年,史特倫堡(Stromberg)採用自動阻風門裝置.
(22)西元1933年,利歐(Reo)車首次裝用半自動變速箱.
(23)西元1934年,前輪開始使用獨立式懸吊系統.
(24)西元1937年,奧次摩比爾車首先採用自動變速節.
(25)西元1938年,克雷斯勒(Chrysler)車裝用液壓傳動飛輪.
(26)西元1940年,採用封閉式頭燈.
(27)西元1946年,自動調整煞車機構開始使用.
(28)西元1948年,別克(Buick)車採用液體扭矩轉換器.
(29)西元1950年,汽油引擎開始採用噴射式燃料系,同年英國路華(Rover)廠使用汽渦輪引擎推動之實驗性汽車製作成功,汽車開始裝配真空管式收音機.
(30)西元1951年,動力轉向機構開始使用,1955年電晶體收音機急速成長.
(31)西元1959年,德國太子(NSU)汽車工廠開始使用迴轉活塞式引擎於車上.
(32)西元1966年,美國立法規定汽車安全標準,加州空氣污染法規定引擎製造嚴格限制有害廢氣之排出量,不得超過一定標準.
(33)西元1967年,德國波細(Bosch)開發完成電晶體控制之汽油噴射裝置(D-Jetronic),IC調整器逐漸取代電譯調整器.
(34)西元1973年,發生能源危機,石油高漲,促使以後之汽車趨向省油輕量化之發展,因此輕合金及塑膠材料廣泛使用於車上.
(35)西元1974年,美國通用(GM)汽車公司發表數位電腦控制車,隨後美國福特.克雷斯勒.日本日產(Nissan).豐田(Toyota.)三菱(Mitsubishi).德國賓士.寶馬(BMW)..等公司亦推出電腦控制進入電腦時代.
(36)西元1978年,福特與通用汽車公司發表回饋(feed back)電子控制化化油器.
我想,發明與創造的目的,無非是改善現況,使生活更便利。然而發明或創造若沒有達到此功效,會因為成本的考量而失敗。其實,從汽車的發展史上,我們可以看到,發明和創造是永無止盡的,需要不斷地改善,而並非一個人可以完成全部。就汽車而言,我歸納出一套發明的過程。
1. 強烈的動機及充足的興趣
2. 收集充足知識及資訊
3. 對發明物做分析
4. 試驗
5. 對市場做分析以符合市場需求
6. 改良
題目三






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}